En amont d’Archipelago, nous nous sommes entretenus avec Andrea Anner et Thibault Brevet d’AATB (Practice for Non-Industrial Robotics), qui ont animé avec Gabrielle Laurin un atelier à la HEAD – Genève fin février intitulé « Artificial Nutrition ». Dans leur pratique, ils expérimentent avec des systèmes robotiques industriels et utilisent des outils tels que des bras robotiques pour explorer les interactions entre l’humain et la machine dans des situations cinétiques et interactives. Andrea et Thibault, qui sont actuellement basés à Marseille, ont entamé leur collaboration pendant leurs études universitaires, avant d’obtenir leur diplôme de design graphique en 2012. Gabrielle, une scénographe de Paris, est récemment venue compléter l’équipe.
Andrea et Thibault se sont pris d’intérêt pour les robots après une exposition sur l’utilisation de la robotique en architecture. Enthousiasmés par les possibilités offertes à d’autres domaines du design, ils se sont mis à produire un corpus de travaux qui englobent autant les installations que le design graphique, le design typographique ou encore la capture de mouvement, entre autres centres d’intérêts. Dans leur pratique, ils imaginent une forme plus fragile et accessible pour les robots. En effet, si les robots sont généralement dépeints dans la culture populaire comme des outils de production précis et efficaces ou comme les hérauts d’une technologie apocalyptique, dans les travaux d’AATB, ils sont exposés et sensibles à toutes les formes d’impuissance auxquelles les êtres de chair sont confrontés, comme la paresse ou la maladresse. Ces tensions qui habitent les robots d’AATB les rendent, eux et leurs performances, poétiquement étranges et quasi absurdes, comme un bras robotique qui souffle des bulles de savon ou deux mains géantes qui tentent une poignée de main, par exemple.
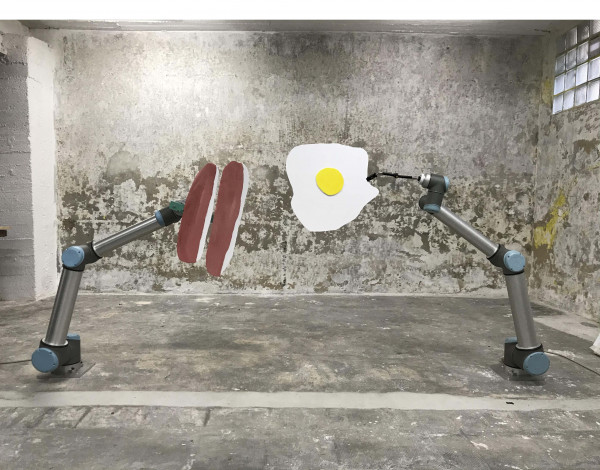
À la HEAD, l’atelier qu’ils ont développé pour la semaine multidisciplinaire (« La semaine de tous les possibles »), elle-même suscitée par Archipelago, s’est inscrit dans cette même ligne d’exploration en soumettant des robots aux rituels organiques qui entourent la nourriture, sa préparation et sa présentation. Pourquoi la nourriture ? Étant donné la gourmandise et le manque de prétention qui caractérisent le travail d’AATB, pourquoi pas ? Andrea et Thibault ont d’ailleurs admis que l’idée de cet atelier est née d’un robot de fast-food, à la fois drôle et terrifiant, à San Francisco, qui leur a servi le déjeuner. Au-delà de cette anecdote, la nourriture est un élément essentiel du quotidien, disent-ils, qui existe dans un creuset social de différents publics, de chorégraphies et de performances diverses, et qui s’aligne donc parfaitement avec les autres travaux d’AATB. Ces recherches sont particulièrement pertinentes dans le contexte du confinement lié à la pandémie, où ces rituels sociaux sont rendus bien plus compliqués. Les robots n’ont pas besoin de nourriture, mais nous oui. Quels sont les potentiels d’une alimentation présentée par des moyens artificiels ?
DUMPSTERDIVINGAPOTHEOSIS par Seongmin Kim
L’atelier s’est déroulé de façon virtuelle en utilisant le logiciel de modélisation et d’animation 3D Maya ainsi qu’un plug-in spécialisé, Mimic, pour simuler les bras du robot. Grâce à ces outils, les étudiant-e-s ont pu explorer toute une gamme de mouvements robotiques avec précision dans un espace virtuel. Il s’agissait là d’une sorte de répétition numérique qu’AATB met souvent en scène dans ses propres travaux. Le code machine développé dans le domaine virtuel est exportable et peut être utilisé pour scénariser le mouvement réel du robot, permettant à Andrea et Thibault de prototyper et de tester des idées sous la forme de ce type d’esquisse numérique, hyper-précis en termes de dimensions et d’échelle, à condition qu’il soit basé sur un modèle lui-même parfaitement fidèle aux conditions réelles. La question de savoir si un robot peut ou non atteindre une étagère en hauteur peut être résolue a priori et sans un travail d’assemblage sur site, qui nécessite des ressources considérables.
Sukiro par Alejandra Oros
Grâce à ce processus, la frontière entre le monde numérique et le monde réel s’estompe, révélant les tolérances qui existent entre les deux. Si les conditions sur le terrain ne sont pas parfaitement conciliées avec le logiciel Maya, l’ensemble s’effondre petit à petit. En effet, lorsque les éléments ne correspondent pas tous, il en résulte une absurdité car le robot est incapable de reconnaître que quelque chose ne va pas, répétant ou poursuivant son script jusqu’à ce qu’il soit interrompu par un agent humain. Il s’agit là d’un exemple de la tension et des possibilités qu’AATB cherche à observer : la précision des robots souligne l’imprécision de tout le reste ; leur monde se reflète sur le nôtre. Comme le note Thibault, le rapport signal/bruit est amplifié. Si l’on supprime un facteur de complication, on en augmente un autre. Andrea et Thibault ont découvert à leurs dépens que les plus petits écarts peuvent avoir de graves effets dans un programme calibré par un robot. Poser les coudes sur la table, par exemple, peut imperceptiblement déformer la surface du bois, modifiant les niveaux d’une machine à dessiner, faisant apparaître et disparaître le dessin. Dans un autre cas, un découpeur à fil chaud sculptant un bloc de mousse produit des résultats étranges après que quelqu’un a modifié l’orientation d’un ventilateur électrique dans la pièce, modifiant les courants d’air ambiant qui font plier le fil. Ainsi, le robot n’est pas qu’un outil, mais devient une sorte de capteur qui nous révèle une dimension de notre propre réalité physique.
Soyons clair, les robots d’AATB ne cherchent pas à devenir humains. Leurs robots n’ont pas l’apparence ou le comportement de cyborgs. Ils soutiennent, ils aident et nous tendent un miroir. Le travail d’AATB remet en question le stéréotype du robot inaccessible, enfermé et précieusement gardé par la grande industrie. Comment rendre les robots plus compréhensibles au quotidien ? En les dotant de la capacité d’échouer, en leur faisant faire des bulles. De cette manière, leurs robots offrent un point d’association ; ils sont accessibles grâce à leur capacité de communication et leur aptitude à évoquer une personnalité.
Notre conversation se termine par une discussion sur les incursions d’AATB dans d’autres domaines. Leur travail s’enrichit au contact de professionnels provenant d’autres disciplines, dont de nombreux non-roboticiens. Les robots sont transversaux, ce qui signifie qu’AATB est capable d’opérer dans de nombreux domaines différents. Il leur est facile de sauter et d’atterrir dans un nouvel espace, de questionner et de construire des processus et des méthodologies qui n’existent pas encore en utilisant les outils qu’ils ont soigneusement élaborés au fil de leurs expérimentations. Ils décrivent la robotique comme une sorte de Far West, où tout ou presque est possible. Tant de grandes entreprises produisent des preuves de concepts, mais ne savent pas quoi en faire. AATB œuvre au sein de ce réseau pour développer, avec d’autres, des applications nouvelles et inattendues pour la technologie robotique, comme en témoigne un projet de filiale, Superposition, qui introduit la capture de mouvement robotique dans la sphère de la production cinématographique. Dans une vidéo publiée sur la page d’accueil de Superposition, on voit à travers les yeux d’un bras robotisé qui examine la tête, les mains et les pieds chaussés de baskets de Roger Federer. Le mouvement est à la fois désorientant et captivant : trop clair et trop lisse pour provenir d’une source humaine. Une fois encore, nous sommes amenés à réfléchir au fossé qui sépare le monde réel du monde robotique.
En dehors de leur travail, le fait le plus impressionnant à propos d’AATB, c’est que leurs connaissances sont le fruit de leurs propres recherches. Ni Andrea ni Thibault n’ont de formation technique. Les bases de leur savoir proviennent de leur volonté de poser des questions, de construire leurs propres outils et d’apprendre en cours de route. L’interdisciplinarité devient alors une stratégie nécessaire à la survie. Leur approche est similaire à celle d’Archipelago, qui plaide pour une recherche ouverte et désaffiliée. Tout semble à portée de main. Ne nourrissez pas les robots, s’il vous plaît, parce qu’à travers le regard d’AATB, on pourrait voir un robot manger, probablement pas pour se nourrir, mais peut-être pour exposer et amplifier des sensations de saveur, de texture et d’odeur. On quitte ainsi la session Zoom l’esprit bien repu et avec de la matière à digérer !
Atelier
AATB (Andrea Anner, Thibault Brevet with Gabrielle Laurin)
Étudiant-e-s
Paul Bellon-Serre, Maylis D'Haultfoeuille, Marie Dupraz, Noam Ferrero, Seongmin Kim, Alexandre Moura Ferreira, Alejandra Oros Barriga, Vincent Paley, Eva Pracca, Patrizio Tannorella, Lauren Thiel, Saro Vallejo, Elsa Wagnières, Madeleine Wiedmer